- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Egy cikk a léptetőmotorok és a szervo- és szervomotorok közötti különbség megértéséhez
I. A léptetőmotorok és a szervo- és szervomotorok közötti különbségek
Léptetőmotor: elektromos impulzusjel a nyitott hurkú vezérlőelem léptetőmotor alkatrészeinek szögeltolódásába vagy vonaleltolódásába. Egyszerűen fogalmazva, az elektromos impulzusjelre támaszkodik a szög és a fordulatok számának szabályozásához. Tehát csak az impulzusjelre hagyatkozik a forgás mértékének meghatározásához. Mivel nincs érzékelő, a megállási szög eltérhet. A pontos impulzusjel azonban minimálisra csökkenti az eltérést.
Szervomotor: támaszkodjon a szervo vezérlőáramkörre a motor fordulatszámának szabályozásához, az érzékelőn keresztül pedig a forgási helyzet szabályozásához. Tehát a helyzetszabályozás nagyon precíz. És a forgási sebesség is változó.
Szervo (elektronikus szervo): A szervo fő összetevője a szervomotor. Tartalmaz egy szervomotor vezérlő áramkört + reduktor készletet. Ja igen, a szervomotorban nincs reduktor készlet. A szervónak pedig van egy redukciós fokozata.
Határszervó esetén a kimenő tengely alatti potenciométerre támaszkodik a kormánykar kormányzási szögének meghatározásához. A szervo jelvezérlés egy impulzusszélesség-modulált (PWM) jel, ahol egy mikrokontroller könnyen generálhatja ezt a jelet.
II. Léptetőmotor alapelve
Hogyan működik:
Normális esetben a motor forgórésze egy állandó mágnes, és amikor áram folyik át az állórész tekercsén, az állórész tekercsek vektormágneses teret hoznak létre. Ez a mágneses tér a forgórészt szögben elforgatja, így a forgórész mágneses mezőpárjának iránya megegyezik az állórész mágneses terének irányával. Amikor az állórész vektormágneses tere szögben elfordul. Ezzel a mágneses térrel a forgórész is szögben elfordul. Minden egyes bemeneti elektromos impulzusnál a motor egy szöglépést forog előre. Kimeneti szögelmozdulása arányos a bemeneti impulzusok számával, forgási sebessége pedig az impulzusok frekvenciájával. A tekercsek feszültségellátásának sorrendjének megváltoztatásával a motor megfordul. Ezért az impulzusok száma és frekvenciája, valamint a motor egyes fázisainak tekercseinek feszültségellátásának sorrendje szabályozható a léptetőmotor forgásának szabályozására.
A hőtermelés elve:
Általában mindenféle motort látni, belső vasmag és tekercs. A tekercsellenállás, a teljesítmény veszteséget okoz, a veszteség mérete és ellenállása, és az áramerősség arányos a négyzettel, amelyet gyakran rézveszteségnek neveznek, ha az áram nem a szabványos DC vagy szinuszhullám, harmonikus veszteséget is termel; A magnak hiszterézis örvényáram hatása van, a váltakozó mágneses térben veszteség is keletkezik, az anyag méretéhez, áramához, frekvenciájához, feszültségéhez kapcsolódó veszteség, amit vasveszteségnek neveznek. A rézveszteség és a vasveszteség hőtermelés formájában nyilvánul meg, ami befolyásolja a motor hatásfokát. A léptetőmotorok általában a pozicionálási pontosságra és a nyomatékkimenetre törekednek, a hatékonyság viszonylag alacsony, az áram általában nagyobb és a harmonikus összetevők magasak, az áram frekvenciája váltakozik a sebességgel és a változással, ezért a léptetőmotorok általában hőhelyzettel rendelkeznek, és a helyzet súlyosabb, mint az általános AC motoré.
III. Kormányszerkezet
A szervo főként házból, áramköri lapból, hajtómotorból, sebességváltóból és helyzetérzékelő elemből áll. Működési elve, hogy a vevő jelet küld a szervónak, az áramköri lapon lévő IC pedig a mag nélküli motort forogni indítja, az erő pedig a reduktoron keresztül a lengőkarra kerül, ezzel egyidejűleg a helyzetérzékelő visszaküld egy jelet, hogy megállapítsa, megérkezett-e a pozicionálás vagy sem. A helyzetérzékelő valójában egy változó ellenállás. Amikor a szervo forog, az ellenállás értéke ennek megfelelően változik, és az elfordulás szöge az ellenállás értékének érzékelésével megismerhető. Az általános szervomotor egy vékony rézhuzal, amely egy hárompólusú forgórész köré van tekerve, amikor az áram átfolyik a tekercsen, mágneses mezőt generál, és a forgórész mágnesének kerülete taszítást generál, ami viszont forgási erőt generál. A fizika szerint egy tárgy tehetetlenségi nyomatéka egyenesen arányos a tömegével, tehát minél nagyobb a forgatandó tárgy tömege, annál nagyobb erőre van szükség. A gyors forgási sebesség és az alacsony energiafogyasztás elérése érdekében a szervo vékony, üreges hengerré csavart vékony rézhuzalokból készül, amelyek egy nagyon könnyű, pólus nélküli üreges rotort alkotnak, és mágnesek vannak elhelyezve a hengerben, amely az üreges csésze motor.
A különböző munkakörnyezetekhez való illeszkedés érdekében vannak víz- és porálló kivitelű szervók; és a különböző terhelési követelményekre reagálva a szervókhoz műanyag és fém fogaskerekek vannak, a szervók fém fogaskerekei pedig általában nagy nyomatékúak és nagy fordulatszámúak, azzal az előnnyel, hogy a fogaskerekek a túlzott terhelés miatt nem csorbulnak. A magasabb minőségű szervók golyóscsapágyakkal lesznek felszerelve, hogy gyorsabbá és pontosabbá tegyék a forgást. Egy golyóscsapágy és két golyóscsapágy között van különbség, persze a két golyóscsapágy jobb. Az új FET szervók főként FET-et (Field Effect Transistor) használnak, amelynek előnye az alacsony belső ellenállás és ezáltal kisebb áramveszteség, mint a normál tranzisztoroké.
IV. Szervó működési elve
A pwm hullámból a belső áramkörbe előfeszítő feszültséget generál, a kontaktor generátor a reduktoron keresztül mozgatja a potenciométert, hogy amikor a feszültségkülönbség nulla, a motor leáll, hogy elérje a szervo hatását.
A szervo PWM-ek protokolljai ugyanazok, de a legújabb szervók eltérőek lehetnek.
A protokoll általában: magas szintű szélesség 0,5 ms-ban ~ 2,5 ms a szervo vezérléséhez, hogy különböző szögekben elforduljon.
V. Hogyan működnek a szervomotorok
Az alábbi ábra egy LM675 teljesítményű műveleti erősítővel készült szervomotor-vezérlő áramkört mutat, a motor pedig egy egyenáramú szervomotor. Amint az ábrán látható, az LM675 teljesítmény-műveleti erősítő 15 V-ról van táplálva, és a 15 V-os feszültség az LM675 műveleti erősítő fázisbeli bemenetére kerül hozzáadásra az RP 1-en keresztül, az LM675 kimeneti feszültsége pedig a szervomotor bemenetére. A motor fordulatszámmérő jelgenerátorral van felszerelve a motor fordulatszámának valós idejű észleléséhez. Valójában a sebességjel-generátor egyfajta generátor, és a kimeneti feszültsége arányos a forgási sebességgel. A G sebességmérő jelgenerátor feszültségkimenete egy feszültségosztó áramkör után fordulatszám-hiba jelként visszatáplál a műveleti erősítő invertáló bemenetére. Az RP1 fordulatszám-vezérlő potenciométer által beállított feszültségérték hozzáadódik a műveleti erősítő fázisbeli bemenetéhez, miután a feszültséget R1.R2-vel osztják, ami megegyezik a referenciafeszültséggel.
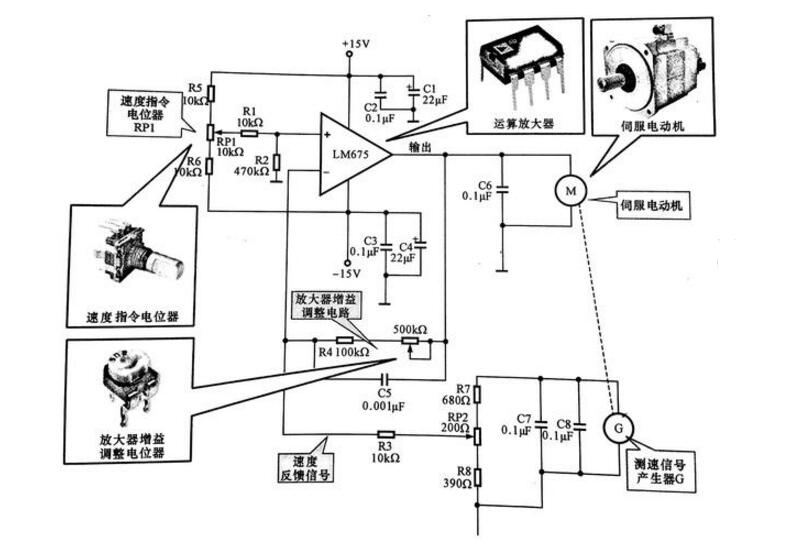
A szervomotor vezérlési vázlata
Szervomotor: A szervomotornál M betűvel jelölve, ez a hajtásrendszer energiaforrása. Műveleti erősítő: az áramkör nevével jelölve, azaz LM675, a szervovezérlő áramkörben lévő erősítődarab, amely a szervomotor meghajtó áramát biztosítja.
RP1 fordulatszám parancs potenciométer: Beállítja a műveleti erősítő referenciafeszültségét az áramkörben, azaz a fordulatszám beállítását. Erősítő erősítés beállító potenciométer RP2: Az áramkörben az erősítő erősítésének és a sebesség-visszacsatoló jel méretének finomhangolására használják.
A motor terhelésének változásával a műveleti erősítő fordított bemenetére visszacsatolt feszültség is változik, azaz a motor terhelésének növelésével a fordulatszám csökken, és a sebességjel-generátor kimeneti feszültsége is csökken, így a műveleti erősítő fordított bemenetén a feszültség csökken, a referenciafeszültség és a működési feszültség különbsége a kimeneti feszültség között. az erősítő növekszik. Ezzel szemben a terhelés csökkenésével és a motor fordulatszámának növekedésével a fordulatszámmérő jelgenerátor kimeneti feszültsége emelkedik, a műveleti erősítő invertált bemenetére adott visszacsatoló feszültség nő, e feszültség és a referenciafeszültség különbsége csökken, a műveleti erősítő kimeneti feszültsége csökken, és a motor fordulatszáma a beállított fordulatszámon automatikusan csökken, így a beállított fordulatszámon automatikusan stabilizálható.